Attention problèmes rencontrés avec BetaFlight (cf. plus bas).
Le eachine 250 avec CC3D est configuré en PPM dans ces explications.
Pré-requis:
- Chargeur micro USB (type chargeur téléphone portable)
- FTDI (convertisseur RS232 série <-> USB)
- Un cable mini USB PC
- Cleanflight-Configurator
- Firmware BetaFlight (voir remarque plus bas) ou Cleanflight
https://github.com/cleanflight/cleanflight/releases (fichier hex pour CC3D)
ou
https://github.com/borisbstyle/betaflight/releases (fichier hex pourCC3D)
1ère étape: Le bootloader
Pour cela, il faut passer la carte en mode bootloader à l'aide les deux pads SBL. Sur la CC3d fournie avec le eachine 250, aucune indication ne permet de trouver ces pads. Les voici:
Faire un court-circuit (à l'aide d'un tournevis) entre les deux pads puis alimenter la carte en USB avec un chargeur de téléphone par exemple. La carte est en mode bootloader.
2ème étape: Le FTDI
- Relier le FTDI au main port (cf. image ci-dessus). Relier les ports TX, RX, MASSE (Ne pas brancher le +5V, la carte est déjà alimentée par l'USB).
- Brancher le FTDI au PC.
3ème étape: Cleanflight-Configurator
Cliquer sur le bouton "Load firmware [local]"
Choisir le fichier HEX récupéré sur le site betaflight ou cleanflight pour CC3D.
Cliquer sur "Flash firmware"
Une fois flashé, on débranche tout. On ferme tout.
Si la communication ne s'établie pas. Inversez TX et RX sur le FTDI. Normalement le TX va au RX et inversement. Sur certains FTDI les indications sont déjà inversées.
4ème étape: Configuration dans cleanflight-configurator
A vous de jouer dans cleanflight pour régler les paramètres comme vous le souhaitez.
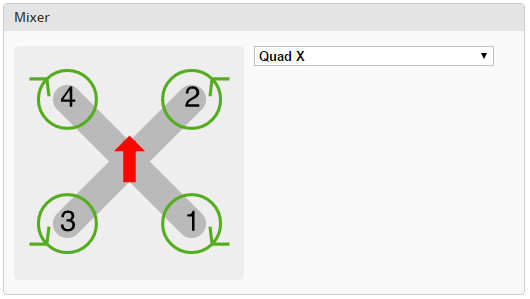
Pour faire correspondre les branchements moteurs qui sont différents entre openpilot/librepilot et cleanflight, deux solutions:
- Modifier logiciellement les affectations à l'aide des commandes suivantes dans le CLI.
mixer custom
mmix reset
mmix 0 1.0, 1.0, -0.930, -1.0
mmix 1 1.0, -1.0, -0.930, 1.0
mmix 2 1.0, -1.0, 0.930, -1.0
mmix 3 1.0, 1.0, 0.930, 1.0

Coté Carte |
Coté PDB |
|
| 1 | 3 | |
| 2 | 2 | |
| 3 | 4 | |
| 4 | 1 |
Remarques liées à Betaflight:
Attention, le câblage "logiciel" (application des commandes dans le CLI (cf. ci-dessus)) semble poser problème. La carte perdait ses capteurs (plus de gryo, ni d'acc).
Sur le dernière flash réalisé avec la dernière version de cleanflight 1.14.0, j'ai été obligé d'activer le PPM (surement pas défaut en PWM).
Dans le CLI, tapez la commande suivante puis save.
feature RX_PPMSource:
http://wikirotors.com/index.php?title=Eachine_Racer_250